
乘用车电动助力转向系统评价方法
电动助力转向系统以其简单、有效、安全、环保和易于控制等特点受到重视,应用范围越来越广。就性能方面而言,电动助力转向系统便于调校,能够提供多种转向感觉,能够在特定工况下提供特定的输出,同时可以为整车高级功能提供接口。EPS的出现可以实现以往传统转向系统无法实现的适宜的转向感觉,但在开发过程中如何进行评价和调整,有效指导电动助力转向系统的设计,已成为国内外EPS开发迫切需要解决的问题。
电动助力转向系统的评价指标和方法
对于整车转向系统的评价而言,目前通用的方法是对四个方面进行评价:转向的灵敏程度、稳定性、准确性和舒适性。转向的灵敏度,即驾驶人转向时车辆对转向操纵的响应速度,响应越快,灵敏度越高;响应越慢,灵敏度越低。稳定性是指转向系统进行转向动作的稳定程度和再现性,不能出现转向的各种故障。准确性是指转向系统响应的程度,既不能过大也不能过小,要符合驾驶人的心理期望。舒适性包括的内容比较多,但总体而言主要关注于抖动、噪声等方面的感受。
针对以上评价内容,采用轻便性试验、回正性试验、中间位置转向性能试验和移线性能试验进行评价。其中舒适性包括轻便性、方向修正的难易程度、转向疲劳程度、转向盘振动等。
不同的车辆助力特性不同,本文针对不同的车辆分别进行了评价试验,根据客观参数的变化观察其对主观感受的影响。道路设置是参考双移线行驶试验规程的ISO/3888技术报告与GB6323-86标准,并考虑车速变化时的适应性设定的。双移线试验道路如图1所示。
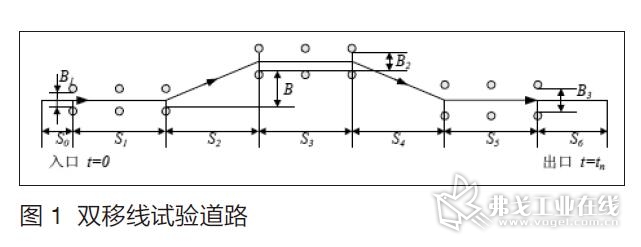
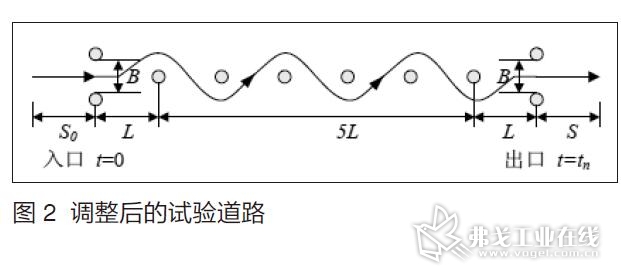
图1中S0=S1=S2=S4=2v; S5=5v; S6=3v,v为汽车行驶速度。变道距离和标杆宽度采用ISO标准。中间位置转向性能试验是考察转向输入操作较小,汽车侧向加速度小于0.1~0.3 m/s2,主要是直线行驶,只作转向的轻微调整和侧向加速度较低时的转向操纵,所以在实际中对GB6323-86标准中的标桩距离进行了调整,采用S0=L=70 m,
S=100 m,B=2.5 m,车速90 km/h,试验道路如图2所示。
评价的试验条件
汽车的转向性能很大程度上和当时的环境相关,如汽车本身的条件、试验场地的状态、天气的影响等。为了关注汽车转向性能,本文首先对环境参数进行了定义,消除不相关因素的干扰。
试验汽车:试验汽车按照出厂状态进行装备。检查四轮定位参数,检查悬架系统。确保汽车符合试验条件。
车辆载重:整个试验过程中,载重不变并小于厂家规定最大总质量。
试验场地:试验场地采用封闭场地,禁止其他车辆或人员通行。路面为沥青铺装路面,坡度小于2%,路面干燥,平坦。
天气:晴,风速小于5m/s,大气温度在0~40℃范围之内。
试验过程
转向动作无时无刻都可能发生,在实际生活中,转向一般发生在以下工况:
(1)原地或低速泊车时 此时车速为零或者较低,车轮与地面摩擦力较大,在转向盘打到底时齿条力将会最大,此时对电动助力转向电动机的转矩要求最大。
(2)中低速转弯时 此时车速一般为10~30km/h,车轮与地面摩擦力为滚动摩擦,摩擦力较小,转向盘一般不会打到止点,所以齿条力较小。
(3)中高速变道或高速紧急避让时 此时车速较快,在30 km/h以上都有可能发生,车轮与地面摩擦力一般很小,转向盘转角不会太大,一般车速越高,转向越小。此时齿条力很小,但对转向速度的要求会提高。
1.原地或低速泊车时转向助力的评价
车辆在静止或低速状态下对转向性能的评价。在实际驾驶工况里一般理解为泊车时助力的大小。 测试方法,发动机怠速,拉起驻车制动杆,踩下制动踏板,将两手握住转向盘,以60 ~150°/s的速度匀速转动,转向范围包括从左止点到右止点的全部工作范围。 通过打转向盘,驾驶人着重感受手力的大小是否合适,左右打是否平衡,是否有抖动。可以得到此时的手力曲线如图3所示。
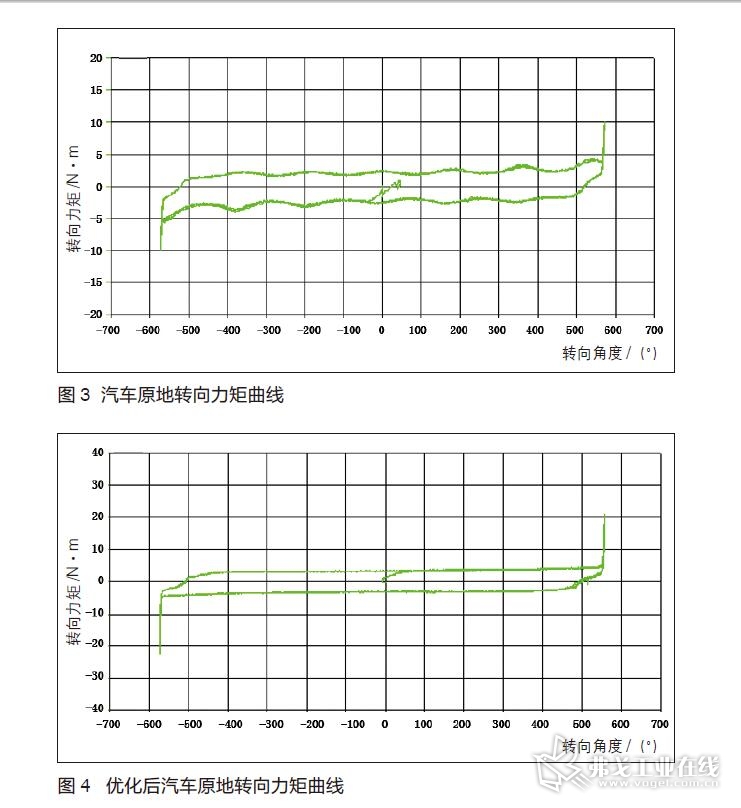
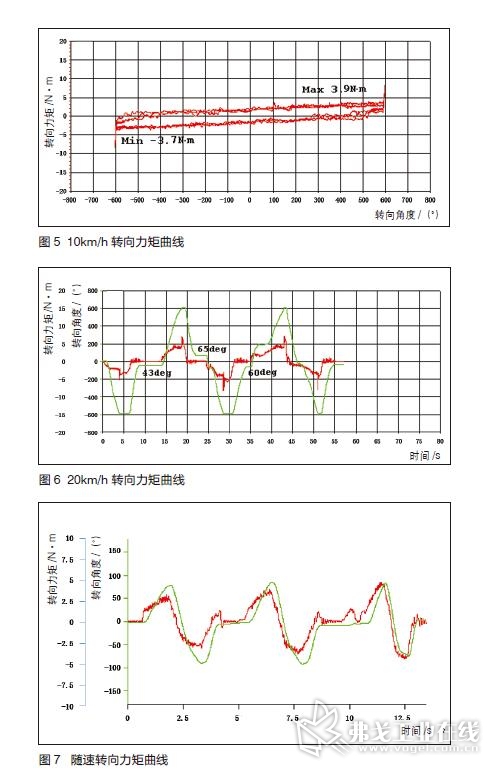
图中Y轴代表转向盘手施加的力矩,X轴代表转向盘转动过的角度。这里以向右转向为正,向左转向为负。所以曲线就表示为手动力矩随着转向盘角度变化而变化的曲线。从上图可以看出此曲线从中间位置开始,继而向右延伸,曲线基本平稳,平均手力矩约为2.5 N·m,快到底时手力矩略为上升,整个曲线有一定的波浪感,说明手力矩有周期性的变化,不是很平滑。 图4中对转向系统做了相关调整,可以看见调整后的曲线基本呈一直线,此时系统工作要稳定得多。
在做此测试的同时,也可以测试转向系统的抖动及噪声。将车门车窗关闭,转动转向盘。 感受来自转向盘的抖动以及聆听是否有噪声。感觉噪声和抖动的操作建议如下:慢速均匀转动转向盘,体会整个转向过程里是否有噪声和转向盘是否平稳;快速来回打转向盘,观察在换向时是否有嘎哒声。
2.中低速助力的评价
中低速助力指车辆在
80 km/h的速度下,动力转向系统工作的情况。 在实际驾驶工况里一般理解为城市道路行驶。
(1)中低速助力大小的评定
将汽车速度稳定在
0~30 km/h的某一个值,这里我们取为10 km/h。 在保持车速的情况下左右打转向,首先将转向盘匀速向右打到极限位置,保持一段时间使汽车刚好转过360°,松开手,使转向盘自动回正,快到中位时扶住转向盘并向左转向,同样打到极限位置,保持使汽车再次转过360°。如此可以反复做多个来回以感受手力矩的大小,手力的左右平衡,转向盘的抖动。借助测试设备我们可以得到如图5所示的曲线。
数据显示,从中间开始,手力矩从2 N·m开始缓慢上升,到达极限位置时达到3.9 N·m; 随着驾驶人回正转向盘,手力矩又逐渐减小,到达左极限位置时达到3.7 N·m。 整个过程中手力矩变化平稳,没有异常跳动。随着角度增大,手力矩慢慢上升,给驾驶人以良好的手感。
(2)中低速回正性能的评定
将汽车速度稳定在0~60 km/h的某一个值,比如20 km/h。 在此情况下将转向盘匀速打到极限位置然后松手,观察转向盘回正角度。驾驶人首先向左打到极限位置保持3s左右时间,然后松开转向盘,在悬架和车重作用下,车辆自动回正达到43°时停止回正。然后驾驶人向右打到极限位置,松开转向盘,车辆回正至65°,然后再次向左右重复以上动作,得到如图6所示的数据曲线。
从测试数据可以看出,该系统在车速为20 km/h时,手力矩与转向盘角度的变化。同时我们可以看出当驾驶人松开转向盘,该车的自动回正角度可以在±65°以内。当然该数据同其他测试一样受到路面情况和驾驶速度的影响。
(3)助力级数
匀速左右转向,车速同时逐步上升,感受手力的变化,如图7所示。
以上测试车速分别为
30 km/h、40 km/h、50 km/h时匀速转动转向盘,得到手力矩,转向盘角度与时间的关系。首先保持车速到30 km/h向右打到90°然后匀速向左转向90°,加速到40 km/h和50 km/h分别重复以上动作。可以看出随着车速上升,转向力矩也随之上升,30 km/h时手力矩大小约为
3 N·m,40 km/h手力矩上升至5 N·m,50 km/h时手力矩上升到5 N·m以上。此时驾驶人会感觉到车速上升时,转向略重,间接地觉得汽车抓地更牢,操纵感更强。
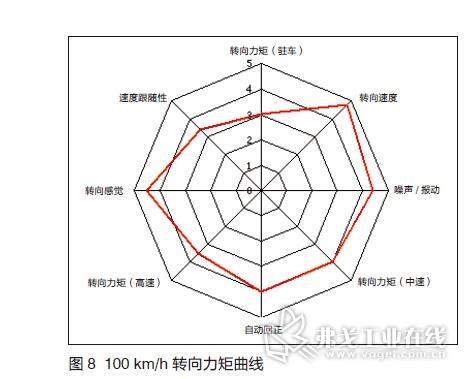
3.高速助力的评价
高速助力指车辆在
80 km/h速度以上,动力转向系统工作的情况。 在实际驾驶工况里一般理解为高速公路上行驶。 如图8和图9所示。车速在100 km/h时,左右转向90°,得到力矩、角度与时间的关系。可以看到现在转向所需要的手力矩已经>
5 N·m,明显高于静态转向所需要的输入。这样做也是考虑到驾驶操纵性能,获得更好的手感。对于最高车速,按照国标GB-T6323.4-1994要求选取最高车速的70%进行试验。
以上就是对汽车转向系统的主要客观评价方法,借助试验手段以客观测量值说明各项指标的意义。 最后,由驾驶人填写主观评价表,获得大多数驾驶人对这辆车的综合评价。 评价活动的样本应越大越好,一般不能少于10人。
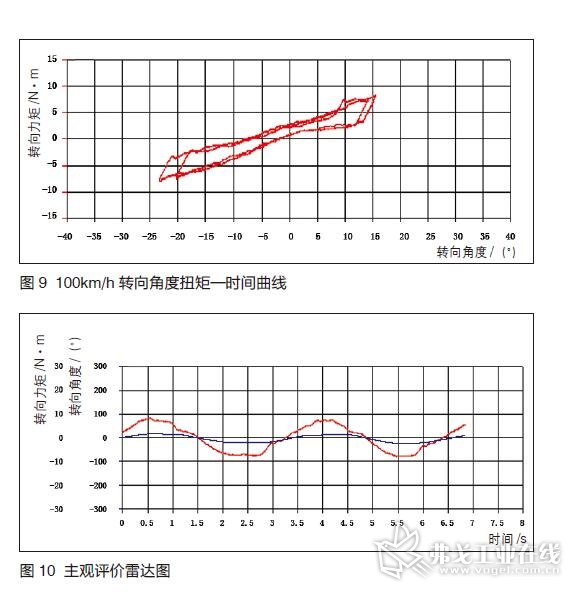
4.主观评价
转向感觉的主观评价是一个综合评价。通过对转向轻便性、主动回正性、移线性能和中间位置转向性能四个方面进行评估。各项指标的评价可以设计如表1所示,如果各单项评价指标和权重系数能够确定,就可以对人—车闭环系统的转向感觉进行全面系统的评价。驾驶人的主观评价是本文的主观评价方法对车辆方案进行了打分。填入表中,各项指标可以分为相关级别如1~5级。 相应级别可以增加相应的权重,最后得到分数。 如图10所示,通过雷达图可以将主观评价进行量化,直观地体现转向系统的性能。

结论
试验车辆的状态如前轴载荷,轮胎参数,车速等。地面状态如材质,干湿程度,倾斜程度等都会对车辆转向主观评价造成影响。为了研究转向系统的主观驾驶感觉就必须对参数进行固化,消除不相关因素的干扰。