
新能源汽车平台化电气架构的设计
随着能源及污染等问题的出现,现今对新能源汽车的需求迫在眉睫。新能源车型分为纯电动、混合动力、燃料电池汽车及氢动力汽车等各种不同的类型。对于整车厂来说,传统发动机车型已经丰富繁杂,现在再增加上新能源车型的需求,令开发的工作量更是成倍增加。
在过去,新能源汽车的各种不同类型的车型,往往是单独设计和开发的。但随着对新能源车型的需求越来越多,且也与传统车的产品规划融合得越来越紧密,因此在一个车型平台的初期,如果能够综合考虑如何让传统车与各种类型的新能源汽车可以共用一个电气架构平台,那将大大提高新能源车型的灵活性,并缩短开发周期,降低开发成本。
新能源汽车的主要分类
新能源汽车按照能源类型分类,可以分为很多种,比如氢能源、燃料电池、镍氢电池及锂电池等。本文主要讨论采用高压锂电池作为能源的新能源汽车类型。
纯电动汽车是指仅采用电机作为动力源,且仅采用电池作为能源的一种新能源汽车。混合动力汽车是指有两种动力作为动力源,传统内燃机和电机均可单独或者混合输出动力给整车。增程式电动汽车是指通过燃油发电,给电池充电,电机驱动车辆行驶。
电机作为车辆的唯一动力来源,发动机仅具备充电功能。插电式混合动力汽车,就是在油电混合动力的基础上,增加了一种可以外接充电的方式补充车辆所需的电能。
新能源汽车的主要方案
与纯电动汽车相比,混合动力汽车有很多种实现方案,如果想用一个电气架构平台支撑起更多的新能源车型,需要在项目的初期就规划好会采用的新能源汽车的方案。
1.混合动力汽车的结构
混合动力车型按照电机位置的不同可以分为以下四个主要类型。P1:电机置于变速器之前,安装在发动机曲轴上,在离合器之前;P2:电机置于变速器的输入端,在离合器之后;P3:电机置于变速器的输出端,与发动机分享同一根轴,同源输出;P4:电机置于变速器之后,与发动机的输出轴分离,一般是驱动无动力的轮子。混合动力结构如图1所示。混合动力方案定义的时候可能不会只采用一种结构,有时可能是多种结构的组合。
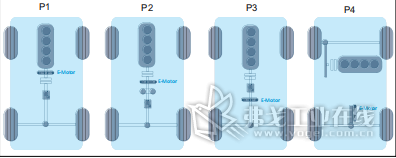
图 1 混合动力结构
2.新能源汽车平台的方案
本文讨论的新能源汽车平台可以支持以下几种方案:
1)一个前驱动电机的纯电动车型。
2)一个前驱动电机加一个后驱动电机的纯电动车型。
3)P2型式的混合动力车型。
4)P2+P4型式的混合动力车型。
5)插电式混合动力车型。
6)传统燃油机车型。
新能源汽车平台化的电气拓扑图设计
1.纯电动车型拓扑图设计
只有一个前驱动电机时,涉及的新能源控制器有新能源整车控制器、电机控制器、电池管理系统、直流转换器、电加热PTC和电动压缩机,由于没有传统车的变速器,因此需要增加离合控制器。如果是有两个驱动电机,则电机控制器应为两个。其他底盘或车身控制则与传统车平台一致。混合动力车型的电气拓扑设计如图2所示。
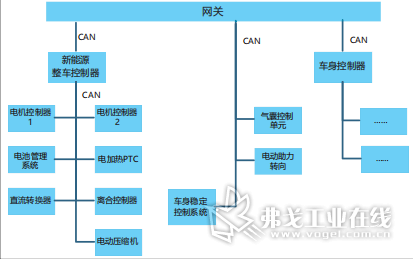
图 2 混合动力车型的电气拓扑设计
2.混合动力车型拓扑图设计
混合动力车型对比电动车型,多出了内燃机所需的发动机控制单元和变速器控制单元部分。新能源整车控制器可以与电动车型共用硬件,但软件功能有所不同。如果是仅P2结构,则仅采用电机控制器1就可以。如果是P2+P4结构的混合动力车型,则采用2个电机控制器。
如果是插电式混合动力车型,则还需要增加1个充电机控制器,与充电桩完成相应的控制和接口匹配。混合动力车型的电气拓扑设计如图3所示。
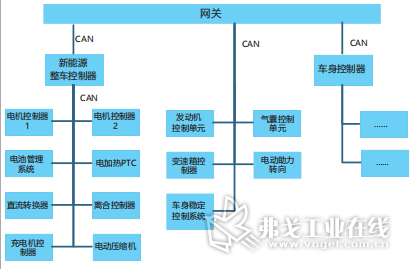
图 3 混合动力车型的电气拓扑设计
3. 传统车型拓扑图设计
为了保证新能源车型与传统车型可以共用同一个电气架构平台,在进行拓扑图设计的时候,将新能源相关零部件设计在一个相对独立的网络中,这样对其他传统车型的网络影响最小。在本设计中,为了考虑与新能源车型的兼容性,传统燃油车型的总线拓扑设计如图4所示。
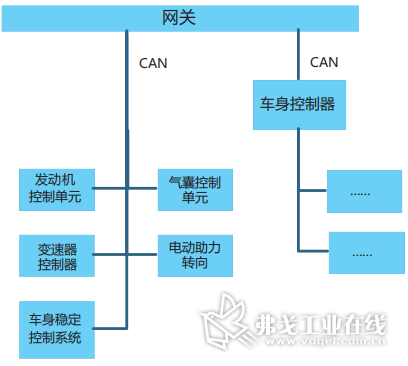
图 4 传统燃油机车型的电气拓扑设计
新能源汽车平台化的网络通信设计
通信矩阵的设计也是电气架构设计中的重要一环。通信矩阵的设计与功能需求密不可分。因此,新能源汽车的通信矩阵,与传统车的通信矩阵也是不同的。不同结构或方案的新能源汽车,如果单独来设计,通信矩阵也是根据需求分别定义,各不相同。但是平台化设计的思路,就是将所有的功能需求整合,将所有的变化的接口统一,并作出分类以及分级。以底盘车身稳定控制系统为例,整车控制器信号接口平台化开发如图5所示。
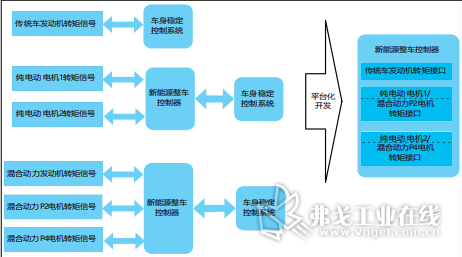
图 5 整车控制器信号接口平台化开发
比如传统车只有发动机与车身稳定控制系统之间有转矩接口的信号交互。如果是纯电动车型,则其转矩接口为电机与车身稳定控制系统之间进行交互。如果是具备两个电机的纯电动汽车,则其转矩交互就有两路接口,且涉及转矩匹配。如果是混合动力车型,仅有一个电机的车型,与车身稳定系统的转矩接口也有两路,分别是发动机与底盘之间的转矩信号接口,以及电动机与底盘之间的转矩信号接口。如果是P2+P4机构的混合动力车型,那么转矩接口其实分为三组:发动机的转矩信号、P2电机的转矩信号以及P4电机的转矩信号。
处理转矩接口的方法有两种,一种是车身稳定系统分别与发动机和电动机进行转矩信号的交互,计算哪个电机应该增加或减少其转矩控制。另一种就是在新能源车型中,车身稳定系统仅将整车的转矩需求发送给整车控制器,由整车控制器进行综合计算,再分配发动机、P2电机和P4电机的转矩如何控制。
图5所示的整车控制器中包含的多个接口,就是采用第二种方法设计的。在整车控制器和车身稳定控制系统开发时,就要提前考虑到传统车、纯电动车型和混合动力车型的通信信号接口及其背后的控制策略。
综上所述,可以通过诊断配置等功能,实现零部件在新能源车型中的通用化。其他零件也采用类似的设计思路,则可以达到整车电气架构平台化的设计。
结论
对整车厂开发来说,平台化的电气架构设计会节省大量的开发周期和费用,缩短零部件的验证时间。电气架构拓扑图以及关键零部件的通信接口和软件策略,在开发初期就充分考虑平台中传统车型、纯电动车型、混合动力车型和插电式混合动力车型的需求和变种,并做好相关拓扑图和接口、软件上的预留,那么仅通过诊断配置便可实现整个车型平台的通用化。